オットーボックの筋電義手

筋電(表面筋電位)とは、脳の命令により筋肉が収縮する際に発生する微弱な電流のことです。
筋電義手では、この筋電を専用の「電極」で採取し、モーターを動かすスイッチとして利用します。モーターが動くことでハンドが開閉し物を「つかむ」「離す」という把持動作ができるようになります。
そして筋電を出力させずリラックスしていれば、閉じたまま、開いたままの状態を保持することができます。
これがオット―ボックの筋電義手の仕組みです。
筋電義手のユーザー動画や機能動画を、下記のリンクからご覧いただけます。
筋電義手の特徴
他の義手と異なり、操作用のハーネスも不要です。そのため、どの位置でも開閉操作をする事ができます。筋電義手の大きな魅力の一つです。さらに把持力が非常に強いので、重量のあるものや、薄いものをしっかり掴む動作が非常に得意です。
この把持力の強さと、作業空間を選ばない特徴が組合わさる事で、生活の幅が格段に広がります。
筋電義手を試してみたい方は、担当の義肢製作施設または医療機関へご相談ください。

筋電義手システム
オットーボックの筋電義手には、「マイオボックシステム」と「アクソンバスシステム」があります。
「マイオボックシステム」は、日本国内に修理拠点があるため安心してお使い頂けます。

bebionicハンド
5本の指がそれぞれ駆動する「5指駆動型」で、多彩で繊細な把持パターンが可能です。
5本の指がそれぞれ駆動する「5指駆動型」で、多彩で繊細な把持パターンが可能です。

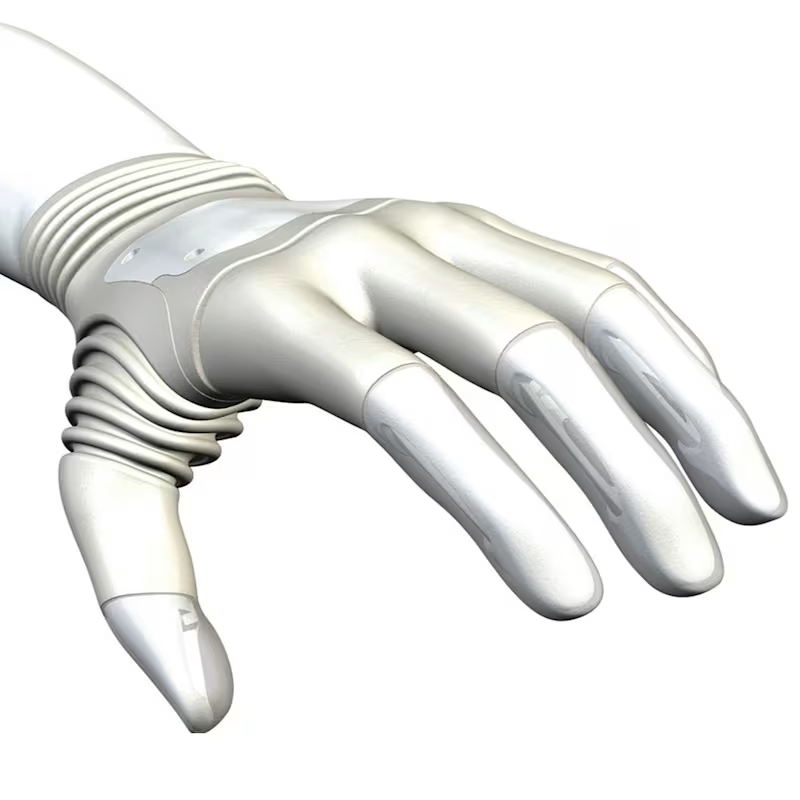
ミケランジェロハンド
ミケランジェロハンドは、拇指の位置(対立位・ラテラル位)を筋電シグナルで切替えることが可能です。
ミケランジェロハンドは、拇指の位置(対立位・ラテラル位)を筋電シグナルで切替えることが可能です。

アクソンアーム
ミケランジェロハンドと組合わせる肘継手です。
ミケランジェロハンドと組合わせる肘継手です。

マイオボックシステム 成人用
身体のどの位置でも操作でき、把持力が強い事が、筋電義手の魅力です。
長年の実績により、世界中の多くのユーザーに使っていただいています。
身体のどの位置でも操作でき、把持力が強い事が、筋電義手の魅力です。
長年の実績により、世界中の多くのユーザーに使っていただいています。

マイオボックシステム 小児用
小さい頃から筋電義手を使い両手動作を習得することで、日常生活でできる作業の幅が広がります。
お子様が使いやすい把持力が充分に備わっています。
小さい頃から筋電義手を使い両手動作を習得することで、日常生活でできる作業の幅が広がります。
お子様が使いやすい把持力が充分に備わっています。

マイオプラスシステム
マイオプラス(MyoPlus)は、様々な把持パターンやローテーター機能を、ユーザーの自然な感覚、直感的な動きで制御する事を目標に開発されたシステムです。
マイオプラス(MyoPlus)は、様々な把持パターンやローテーター機能を、ユーザーの自然な感覚、直感的な動きで制御する事を目標に開発されたシステムです。
ダウンロード
開発の歴史 ~オットーボック筋電義手~
「MYO(マイオ)」とは、もともとギリシャ語で「筋肉」を意味する「MYS」から派生した言葉で、「Myoelectric=筋電」のように、他の言葉に接続され「筋肉」と関連言葉となりました。