


コンピューター制御足部
動画集:メリディウム
メリディウムは足関節の大きな動きと、それに連動してMP関節の動きまでコンピューター制御する足部です。
メリディウムは足関節の大きな動きと、それに連動してMP関節の動きまでコンピューター制御する足部です。
ユーザー動画
Hansの日常
1B1 メリディウムに関するユーザーインタビュー動画や機能の紹介動画をご覧いただけます。
他の足部とは何が違うのか、どんな機能を持っているのか、そしてメリディウムユーザーの滑らかな歩容、またどのような日常を送っていているのか、是非ご覧ください。
「メリディウムを装着した私を見ても、片方が義足だと分からないでしょう。」「歩くことに何ら意識を向ける必要がありません。」 ー Hans ー
歩行の特徴
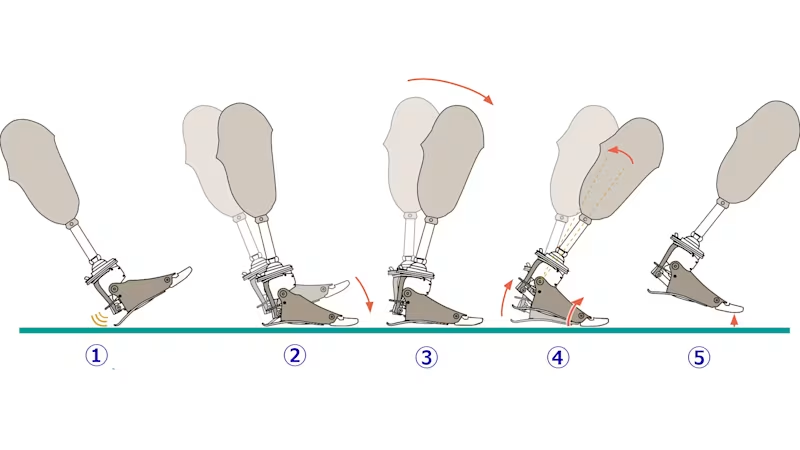
コンピューターで制御された一連の動きで、歩行スピードの変化にもリアルタイムで対応します。
①踵接地時にはヒールプレートが衝撃を吸収してくれます。
②~③コンピューター制御された油圧抵抗で、足底接地から踏返しへ滑らかな動きを得ることができます。
④つま先が離れる時には、メリディウムの特徴でもあるMP関節を軸として回転します。
そのため前方への動きがサポートされ、快適で美しい歩行を生み出します。
⑤遊脚相では、足部が背屈位で保持されるため、つまづく危険性が減少します。
機能の詳細は製品ページをご覧ください。
関連情報