ミケランジェロハンド

機能性と装飾性
ミケランジェロハンドは、機能性と装飾性の両方を兼ね備えた筋電義手システムです。
機能面では、把持パターンにラテラルピンチ(拇指が示指の側面にある)が新たに加わりました。拇指の位置を筋電シグナルで切り替える事ができます。
装飾面では、手首を人間の手と同じように楕円形にし、より自然な外観を実現しています。
多彩な把持パターン
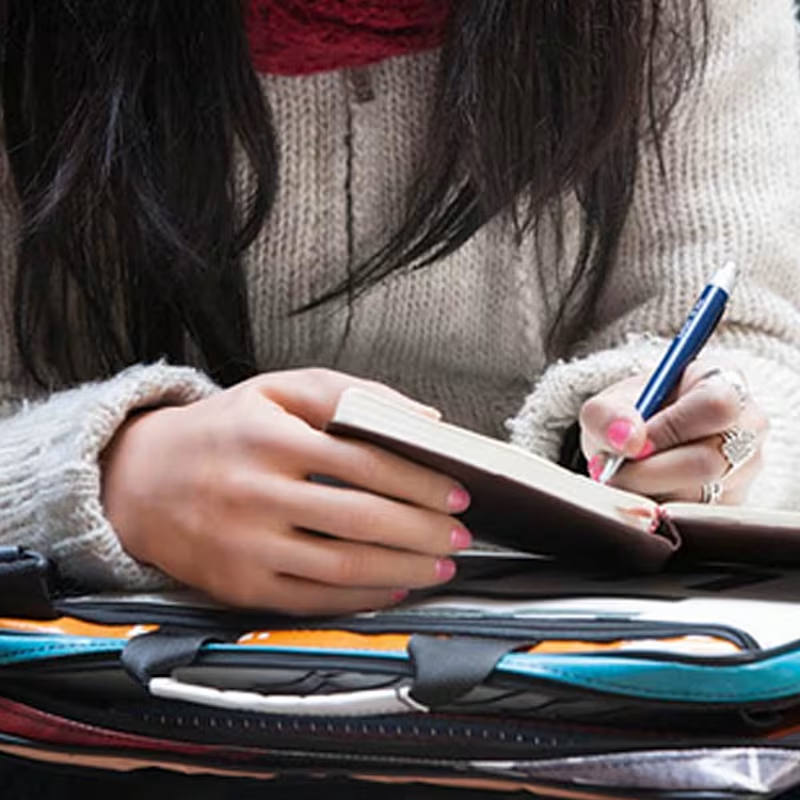
ラテラルピンチ
拇指が、示指の側面に位置している時の摘み動作です。
日常生活において非常に多くの場面で使われる把持動作です。
本を持ったり、カードや資料を掴んだり、トランプを楽しんだり、様々な場面で活躍します。
さらに肩や肘での代償運動が軽減される事も大きなメリットの一つです。









ミケランジェロハンドの機能

強い把持力
最大把持力:7Kg(対立位)、6Kg(ラテラル位)
重量のあるもの、薄いものをしっかり掴む動作が非常に得意です。
例えば、ナイフとフォークをもって食事をしたり、靴紐を結んだり、布団をたたんだり、生活の中でできることが増えるのではないでしょうか。
能動義手や装飾義手では難しかった両手動作が可能になったり、生活の幅が格段に広がります。



外観の特徴

自然な手首の角度
ミケランジェロハンドは人間の手と同じように尺屈(小指側へ傾斜)しています。
これによって腕をおろしている時や、開閉動作をしていない時でも、外観がとても自然です。
さらにコップなどを掴む場合も肩や肘の代償運動を軽減する事もできます。


ミケランジェロハンドと組合せるパーツ
13E500 アクソンマスター
アクソンマスターは、ミケランジェロハンド、アクソンアーム(12K501)を含むアクソンバスシステムを制御するコントローラーです。
専用の調整ソフトとブルートゥース接続し、装着者個々の設定を行います。
アクソンマスター本体に電極が接続され、ケーブルはバッテリーに接続されます。



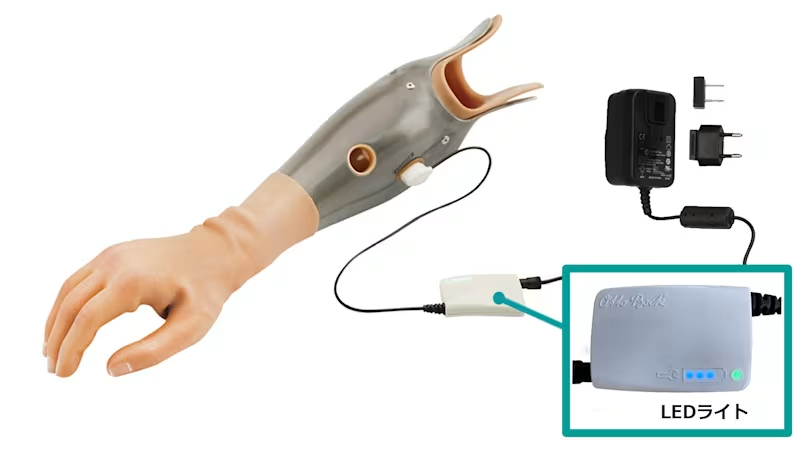


組合せパーツ
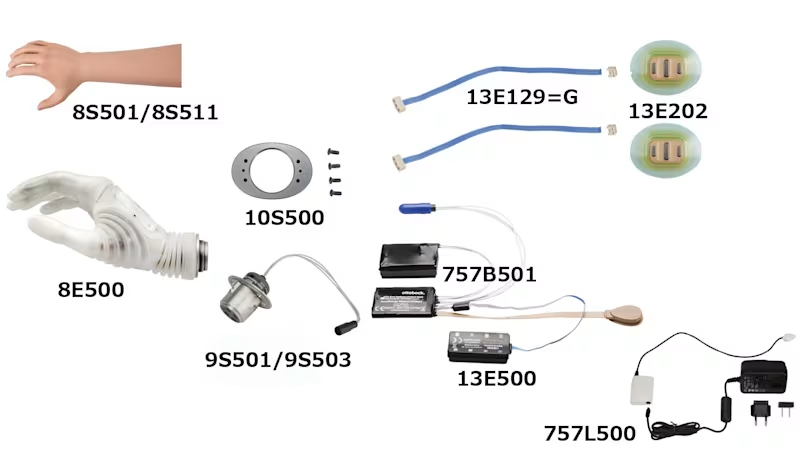
前腕義手 構成図
ミケランジェロハンドを組合わせた前腕義手を構成するパーツです。
上腕義手 構成図
ミケランジェロハンドと12K501アクソンアームを組合わせた上腕義手を構成するパーツです。

肩義手 構成図
ミケランジェロハンドと12K501アクソンアーム肘継手、12S6スウィング肩継手を組合わせた肩義手を構成するパーツです。


